#include <node_handle.h>
|
| | NodeHandle_ () |
| |
| Hardware * | getHardware () |
| |
| void | initNode () |
| |
| void | initNode (char *portName) |
| |
| virtual int | spinOnce () |
| |
| virtual bool | connected () |
| |
| void | requestSyncTime () |
| |
| void | syncTime (uint8_t *data) |
| |
| Time | now () |
| |
| void | setNow (Time &new_now) |
| |
| bool | advertise (Publisher &p) |
| |
| template<typename MsgT > |
| bool | subscribe (Subscriber< MsgT > &s) |
| |
| template<typename MReq , typename MRes > |
| bool | advertiseService (ServiceServer< MReq, MRes > &srv) |
| |
| template<typename MReq , typename MRes > |
| bool | serviceClient (ServiceClient< MReq, MRes > &srv) |
| |
| void | negotiateTopics () |
| |
| virtual int | publish (int id, const Msg *msg) |
| |
| void | logdebug (const char *msg) |
| |
| void | loginfo (const char *msg) |
| |
| void | logwarn (const char *msg) |
| |
| void | logerror (const char *msg) |
| |
| void | logfatal (const char *msg) |
| |
| bool | getParam (const char *name, int *param, int length=1) |
| |
| bool | getParam (const char *name, float *param, int length=1) |
| |
| bool | getParam (const char *name, char **param, int length=1) |
| |
|
| void | log (char byte, const char *msg) |
| |
| bool | requestParam (const char *name, int time_out=1000) |
| |
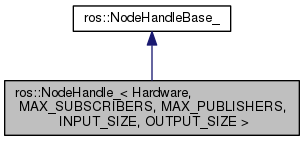
template<class Hardware , int MAX_SUBSCRIBERS = 25, int MAX_PUBLISHERS = 25, int INPUT_SIZE = 512, int OUTPUT_SIZE = 512>
template<class Hardware , int MAX_SUBSCRIBERS = 25, int MAX_PUBLISHERS = 25, int INPUT_SIZE = 512, int OUTPUT_SIZE = 512>
template<class Hardware , int MAX_SUBSCRIBERS = 25, int MAX_PUBLISHERS = 25, int INPUT_SIZE = 512, int OUTPUT_SIZE = 512>
template<typename MReq , typename MRes >
| bool ros::NodeHandle_< Hardware, MAX_SUBSCRIBERS, MAX_PUBLISHERS, INPUT_SIZE, OUTPUT_SIZE >::advertiseService |
( |
ServiceServer< MReq, MRes > & |
srv | ) |
|
|
inline |
template<class Hardware , int MAX_SUBSCRIBERS = 25, int MAX_PUBLISHERS = 25, int INPUT_SIZE = 512, int OUTPUT_SIZE = 512>
| virtual bool ros::NodeHandle_< Hardware, MAX_SUBSCRIBERS, MAX_PUBLISHERS, INPUT_SIZE, OUTPUT_SIZE >::connected |
( |
| ) |
|
|
inlinevirtual |
template<class Hardware , int MAX_SUBSCRIBERS = 25, int MAX_PUBLISHERS = 25, int INPUT_SIZE = 512, int OUTPUT_SIZE = 512>
| Hardware* ros::NodeHandle_< Hardware, MAX_SUBSCRIBERS, MAX_PUBLISHERS, INPUT_SIZE, OUTPUT_SIZE >::getHardware |
( |
| ) |
|
|
inline |
template<class Hardware , int MAX_SUBSCRIBERS = 25, int MAX_PUBLISHERS = 25, int INPUT_SIZE = 512, int OUTPUT_SIZE = 512>
| bool ros::NodeHandle_< Hardware, MAX_SUBSCRIBERS, MAX_PUBLISHERS, INPUT_SIZE, OUTPUT_SIZE >::getParam |
( |
const char * |
name, |
|
|
int * |
param, |
|
|
int |
length = 1 |
|
) |
| |
|
inline |
template<class Hardware , int MAX_SUBSCRIBERS = 25, int MAX_PUBLISHERS = 25, int INPUT_SIZE = 512, int OUTPUT_SIZE = 512>
| bool ros::NodeHandle_< Hardware, MAX_SUBSCRIBERS, MAX_PUBLISHERS, INPUT_SIZE, OUTPUT_SIZE >::getParam |
( |
const char * |
name, |
|
|
float * |
param, |
|
|
int |
length = 1 |
|
) |
| |
|
inline |
template<class Hardware , int MAX_SUBSCRIBERS = 25, int MAX_PUBLISHERS = 25, int INPUT_SIZE = 512, int OUTPUT_SIZE = 512>
| bool ros::NodeHandle_< Hardware, MAX_SUBSCRIBERS, MAX_PUBLISHERS, INPUT_SIZE, OUTPUT_SIZE >::getParam |
( |
const char * |
name, |
|
|
char ** |
param, |
|
|
int |
length = 1 |
|
) |
| |
|
inline |
template<class Hardware , int MAX_SUBSCRIBERS = 25, int MAX_PUBLISHERS = 25, int INPUT_SIZE = 512, int OUTPUT_SIZE = 512>
| void ros::NodeHandle_< Hardware, MAX_SUBSCRIBERS, MAX_PUBLISHERS, INPUT_SIZE, OUTPUT_SIZE >::initNode |
( |
| ) |
|
|
inline |
template<class Hardware , int MAX_SUBSCRIBERS = 25, int MAX_PUBLISHERS = 25, int INPUT_SIZE = 512, int OUTPUT_SIZE = 512>
| void ros::NodeHandle_< Hardware, MAX_SUBSCRIBERS, MAX_PUBLISHERS, INPUT_SIZE, OUTPUT_SIZE >::initNode |
( |
char * |
portName | ) |
|
|
inline |
template<class Hardware , int MAX_SUBSCRIBERS = 25, int MAX_PUBLISHERS = 25, int INPUT_SIZE = 512, int OUTPUT_SIZE = 512>
| void ros::NodeHandle_< Hardware, MAX_SUBSCRIBERS, MAX_PUBLISHERS, INPUT_SIZE, OUTPUT_SIZE >::log |
( |
char |
byte, |
|
|
const char * |
msg |
|
) |
| |
|
inlineprivate |
template<class Hardware , int MAX_SUBSCRIBERS = 25, int MAX_PUBLISHERS = 25, int INPUT_SIZE = 512, int OUTPUT_SIZE = 512>
| void ros::NodeHandle_< Hardware, MAX_SUBSCRIBERS, MAX_PUBLISHERS, INPUT_SIZE, OUTPUT_SIZE >::logdebug |
( |
const char * |
msg | ) |
|
|
inline |
template<class Hardware , int MAX_SUBSCRIBERS = 25, int MAX_PUBLISHERS = 25, int INPUT_SIZE = 512, int OUTPUT_SIZE = 512>
| void ros::NodeHandle_< Hardware, MAX_SUBSCRIBERS, MAX_PUBLISHERS, INPUT_SIZE, OUTPUT_SIZE >::logerror |
( |
const char * |
msg | ) |
|
|
inline |
template<class Hardware , int MAX_SUBSCRIBERS = 25, int MAX_PUBLISHERS = 25, int INPUT_SIZE = 512, int OUTPUT_SIZE = 512>
| void ros::NodeHandle_< Hardware, MAX_SUBSCRIBERS, MAX_PUBLISHERS, INPUT_SIZE, OUTPUT_SIZE >::logfatal |
( |
const char * |
msg | ) |
|
|
inline |
template<class Hardware , int MAX_SUBSCRIBERS = 25, int MAX_PUBLISHERS = 25, int INPUT_SIZE = 512, int OUTPUT_SIZE = 512>
| void ros::NodeHandle_< Hardware, MAX_SUBSCRIBERS, MAX_PUBLISHERS, INPUT_SIZE, OUTPUT_SIZE >::loginfo |
( |
const char * |
msg | ) |
|
|
inline |
template<class Hardware , int MAX_SUBSCRIBERS = 25, int MAX_PUBLISHERS = 25, int INPUT_SIZE = 512, int OUTPUT_SIZE = 512>
| void ros::NodeHandle_< Hardware, MAX_SUBSCRIBERS, MAX_PUBLISHERS, INPUT_SIZE, OUTPUT_SIZE >::logwarn |
( |
const char * |
msg | ) |
|
|
inline |
template<class Hardware , int MAX_SUBSCRIBERS = 25, int MAX_PUBLISHERS = 25, int INPUT_SIZE = 512, int OUTPUT_SIZE = 512>
| void ros::NodeHandle_< Hardware, MAX_SUBSCRIBERS, MAX_PUBLISHERS, INPUT_SIZE, OUTPUT_SIZE >::negotiateTopics |
( |
| ) |
|
|
inline |
template<class Hardware , int MAX_SUBSCRIBERS = 25, int MAX_PUBLISHERS = 25, int INPUT_SIZE = 512, int OUTPUT_SIZE = 512>
| Time ros::NodeHandle_< Hardware, MAX_SUBSCRIBERS, MAX_PUBLISHERS, INPUT_SIZE, OUTPUT_SIZE >::now |
( |
| ) |
|
|
inline |
template<class Hardware , int MAX_SUBSCRIBERS = 25, int MAX_PUBLISHERS = 25, int INPUT_SIZE = 512, int OUTPUT_SIZE = 512>
| virtual int ros::NodeHandle_< Hardware, MAX_SUBSCRIBERS, MAX_PUBLISHERS, INPUT_SIZE, OUTPUT_SIZE >::publish |
( |
int |
id, |
|
|
const Msg * |
msg |
|
) |
| |
|
inlinevirtual |
template<class Hardware , int MAX_SUBSCRIBERS = 25, int MAX_PUBLISHERS = 25, int INPUT_SIZE = 512, int OUTPUT_SIZE = 512>
| bool ros::NodeHandle_< Hardware, MAX_SUBSCRIBERS, MAX_PUBLISHERS, INPUT_SIZE, OUTPUT_SIZE >::requestParam |
( |
const char * |
name, |
|
|
int |
time_out = 1000 |
|
) |
| |
|
inlineprivate |
template<class Hardware , int MAX_SUBSCRIBERS = 25, int MAX_PUBLISHERS = 25, int INPUT_SIZE = 512, int OUTPUT_SIZE = 512>
| void ros::NodeHandle_< Hardware, MAX_SUBSCRIBERS, MAX_PUBLISHERS, INPUT_SIZE, OUTPUT_SIZE >::requestSyncTime |
( |
| ) |
|
|
inline |
template<class Hardware , int MAX_SUBSCRIBERS = 25, int MAX_PUBLISHERS = 25, int INPUT_SIZE = 512, int OUTPUT_SIZE = 512>
template<typename MReq , typename MRes >
template<class Hardware , int MAX_SUBSCRIBERS = 25, int MAX_PUBLISHERS = 25, int INPUT_SIZE = 512, int OUTPUT_SIZE = 512>
| void ros::NodeHandle_< Hardware, MAX_SUBSCRIBERS, MAX_PUBLISHERS, INPUT_SIZE, OUTPUT_SIZE >::setNow |
( |
Time & |
new_now | ) |
|
|
inline |
template<class Hardware , int MAX_SUBSCRIBERS = 25, int MAX_PUBLISHERS = 25, int INPUT_SIZE = 512, int OUTPUT_SIZE = 512>
| virtual int ros::NodeHandle_< Hardware, MAX_SUBSCRIBERS, MAX_PUBLISHERS, INPUT_SIZE, OUTPUT_SIZE >::spinOnce |
( |
| ) |
|
|
inlinevirtual |
template<class Hardware , int MAX_SUBSCRIBERS = 25, int MAX_PUBLISHERS = 25, int INPUT_SIZE = 512, int OUTPUT_SIZE = 512>
template<typename MsgT >
template<class Hardware , int MAX_SUBSCRIBERS = 25, int MAX_PUBLISHERS = 25, int INPUT_SIZE = 512, int OUTPUT_SIZE = 512>
| void ros::NodeHandle_< Hardware, MAX_SUBSCRIBERS, MAX_PUBLISHERS, INPUT_SIZE, OUTPUT_SIZE >::syncTime |
( |
uint8_t * |
data | ) |
|
|
inline |
template<class Hardware , int MAX_SUBSCRIBERS = 25, int MAX_PUBLISHERS = 25, int INPUT_SIZE = 512, int OUTPUT_SIZE = 512>
| int ros::NodeHandle_< Hardware, MAX_SUBSCRIBERS, MAX_PUBLISHERS, INPUT_SIZE, OUTPUT_SIZE >::bytes_ |
|
protected |
template<class Hardware , int MAX_SUBSCRIBERS = 25, int MAX_PUBLISHERS = 25, int INPUT_SIZE = 512, int OUTPUT_SIZE = 512>
| int ros::NodeHandle_< Hardware, MAX_SUBSCRIBERS, MAX_PUBLISHERS, INPUT_SIZE, OUTPUT_SIZE >::checksum_ |
|
protected |
template<class Hardware , int MAX_SUBSCRIBERS = 25, int MAX_PUBLISHERS = 25, int INPUT_SIZE = 512, int OUTPUT_SIZE = 512>
| bool ros::NodeHandle_< Hardware, MAX_SUBSCRIBERS, MAX_PUBLISHERS, INPUT_SIZE, OUTPUT_SIZE >::configured_ |
|
protected |
template<class Hardware , int MAX_SUBSCRIBERS = 25, int MAX_PUBLISHERS = 25, int INPUT_SIZE = 512, int OUTPUT_SIZE = 512>
| Hardware ros::NodeHandle_< Hardware, MAX_SUBSCRIBERS, MAX_PUBLISHERS, INPUT_SIZE, OUTPUT_SIZE >::hardware_ |
|
protected |
template<class Hardware , int MAX_SUBSCRIBERS = 25, int MAX_PUBLISHERS = 25, int INPUT_SIZE = 512, int OUTPUT_SIZE = 512>
| int ros::NodeHandle_< Hardware, MAX_SUBSCRIBERS, MAX_PUBLISHERS, INPUT_SIZE, OUTPUT_SIZE >::index_ |
|
protected |
template<class Hardware , int MAX_SUBSCRIBERS = 25, int MAX_PUBLISHERS = 25, int INPUT_SIZE = 512, int OUTPUT_SIZE = 512>
| uint32_t ros::NodeHandle_< Hardware, MAX_SUBSCRIBERS, MAX_PUBLISHERS, INPUT_SIZE, OUTPUT_SIZE >::last_msg_timeout_time |
|
protected |
template<class Hardware , int MAX_SUBSCRIBERS = 25, int MAX_PUBLISHERS = 25, int INPUT_SIZE = 512, int OUTPUT_SIZE = 512>
| uint32_t ros::NodeHandle_< Hardware, MAX_SUBSCRIBERS, MAX_PUBLISHERS, INPUT_SIZE, OUTPUT_SIZE >::last_sync_receive_time |
|
protected |
template<class Hardware , int MAX_SUBSCRIBERS = 25, int MAX_PUBLISHERS = 25, int INPUT_SIZE = 512, int OUTPUT_SIZE = 512>
| uint32_t ros::NodeHandle_< Hardware, MAX_SUBSCRIBERS, MAX_PUBLISHERS, INPUT_SIZE, OUTPUT_SIZE >::last_sync_time |
|
protected |
template<class Hardware , int MAX_SUBSCRIBERS = 25, int MAX_PUBLISHERS = 25, int INPUT_SIZE = 512, int OUTPUT_SIZE = 512>
| uint8_t ros::NodeHandle_< Hardware, MAX_SUBSCRIBERS, MAX_PUBLISHERS, INPUT_SIZE, OUTPUT_SIZE >::message_in[INPUT_SIZE] |
|
protected |
template<class Hardware , int MAX_SUBSCRIBERS = 25, int MAX_PUBLISHERS = 25, int INPUT_SIZE = 512, int OUTPUT_SIZE = 512>
| uint8_t ros::NodeHandle_< Hardware, MAX_SUBSCRIBERS, MAX_PUBLISHERS, INPUT_SIZE, OUTPUT_SIZE >::message_out[OUTPUT_SIZE] |
|
protected |
template<class Hardware , int MAX_SUBSCRIBERS = 25, int MAX_PUBLISHERS = 25, int INPUT_SIZE = 512, int OUTPUT_SIZE = 512>
| int ros::NodeHandle_< Hardware, MAX_SUBSCRIBERS, MAX_PUBLISHERS, INPUT_SIZE, OUTPUT_SIZE >::mode_ |
|
protected |
template<class Hardware , int MAX_SUBSCRIBERS = 25, int MAX_PUBLISHERS = 25, int INPUT_SIZE = 512, int OUTPUT_SIZE = 512>
| uint32_t ros::NodeHandle_< Hardware, MAX_SUBSCRIBERS, MAX_PUBLISHERS, INPUT_SIZE, OUTPUT_SIZE >::nsec_offset |
|
protected |
template<class Hardware , int MAX_SUBSCRIBERS = 25, int MAX_PUBLISHERS = 25, int INPUT_SIZE = 512, int OUTPUT_SIZE = 512>
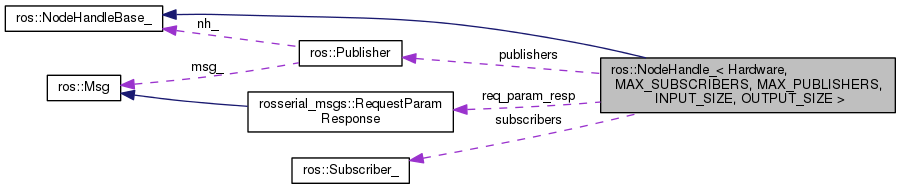
| bool ros::NodeHandle_< Hardware, MAX_SUBSCRIBERS, MAX_PUBLISHERS, INPUT_SIZE, OUTPUT_SIZE >::param_recieved |
|
private |
template<class Hardware , int MAX_SUBSCRIBERS = 25, int MAX_PUBLISHERS = 25, int INPUT_SIZE = 512, int OUTPUT_SIZE = 512>
| Publisher* ros::NodeHandle_< Hardware, MAX_SUBSCRIBERS, MAX_PUBLISHERS, INPUT_SIZE, OUTPUT_SIZE >::publishers[MAX_PUBLISHERS] |
|
protected |
template<class Hardware , int MAX_SUBSCRIBERS = 25, int MAX_PUBLISHERS = 25, int INPUT_SIZE = 512, int OUTPUT_SIZE = 512>
template<class Hardware , int MAX_SUBSCRIBERS = 25, int MAX_PUBLISHERS = 25, int INPUT_SIZE = 512, int OUTPUT_SIZE = 512>
| uint32_t ros::NodeHandle_< Hardware, MAX_SUBSCRIBERS, MAX_PUBLISHERS, INPUT_SIZE, OUTPUT_SIZE >::rt_time |
|
protected |
template<class Hardware , int MAX_SUBSCRIBERS = 25, int MAX_PUBLISHERS = 25, int INPUT_SIZE = 512, int OUTPUT_SIZE = 512>
| uint32_t ros::NodeHandle_< Hardware, MAX_SUBSCRIBERS, MAX_PUBLISHERS, INPUT_SIZE, OUTPUT_SIZE >::sec_offset |
|
protected |
template<class Hardware , int MAX_SUBSCRIBERS = 25, int MAX_PUBLISHERS = 25, int INPUT_SIZE = 512, int OUTPUT_SIZE = 512>
template<class Hardware , int MAX_SUBSCRIBERS = 25, int MAX_PUBLISHERS = 25, int INPUT_SIZE = 512, int OUTPUT_SIZE = 512>
| int ros::NodeHandle_< Hardware, MAX_SUBSCRIBERS, MAX_PUBLISHERS, INPUT_SIZE, OUTPUT_SIZE >::topic_ |
|
protected |
The documentation for this class was generated from the following file:
 1.8.6
1.8.6

